Summary¶
In this project we are divided in to two sub teams:
| Modelling Sub Team (My Team) | Computing Sub Team |
|---|---|
| Create a container that fits inside an assigned footprint and securely holds an assigned surgical tool. | Write a python program to control an robot arm to move the container from one location to autoclave. |
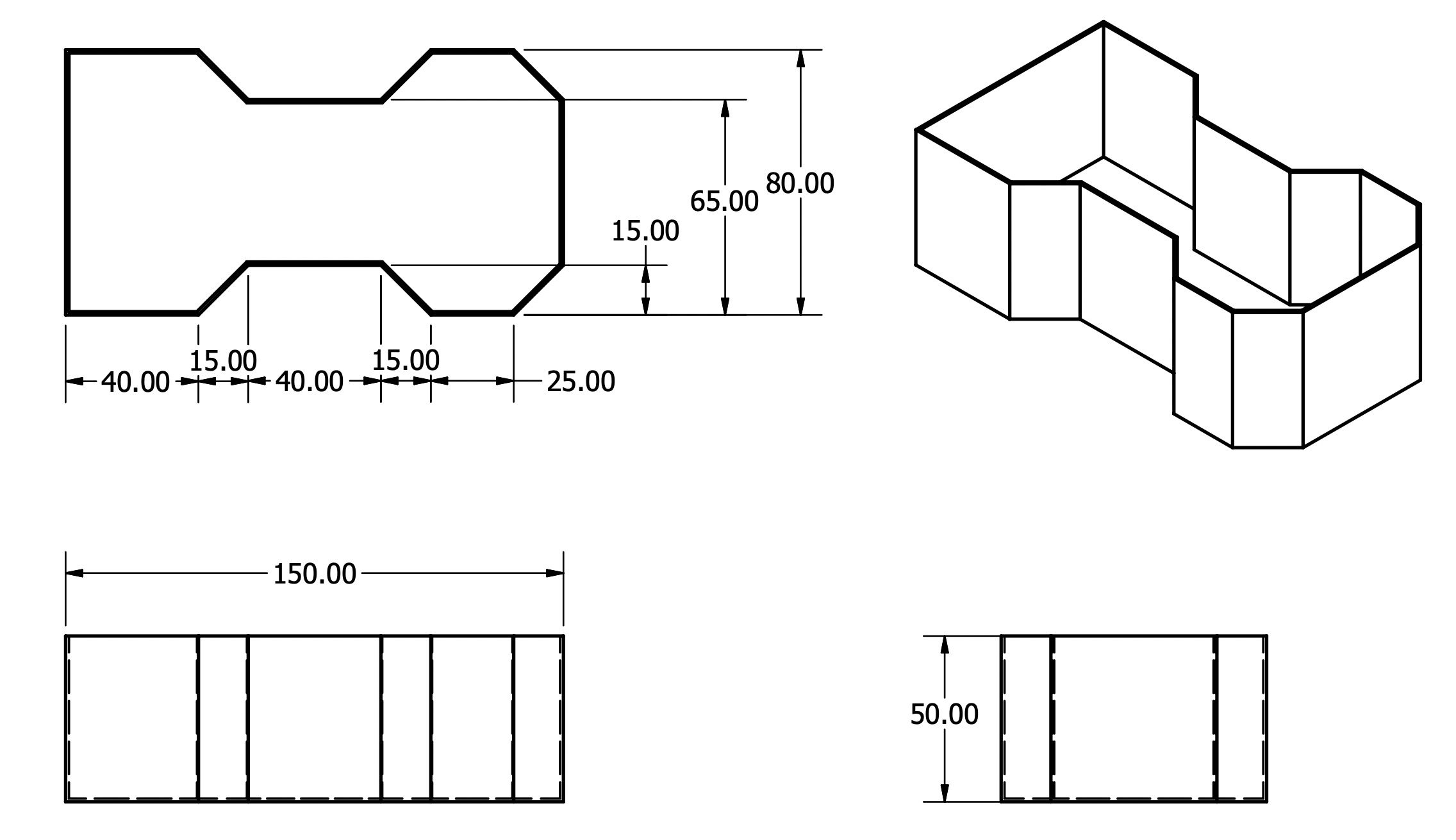
Our Footprint¶
The container must fit inside this.
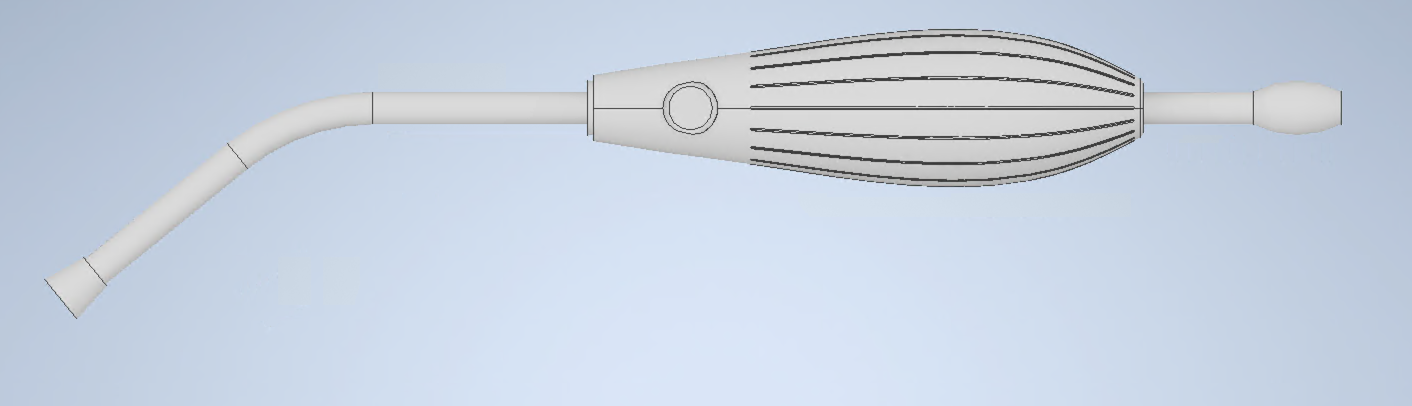
Our Surgical Tool¶
Our Final Model¶
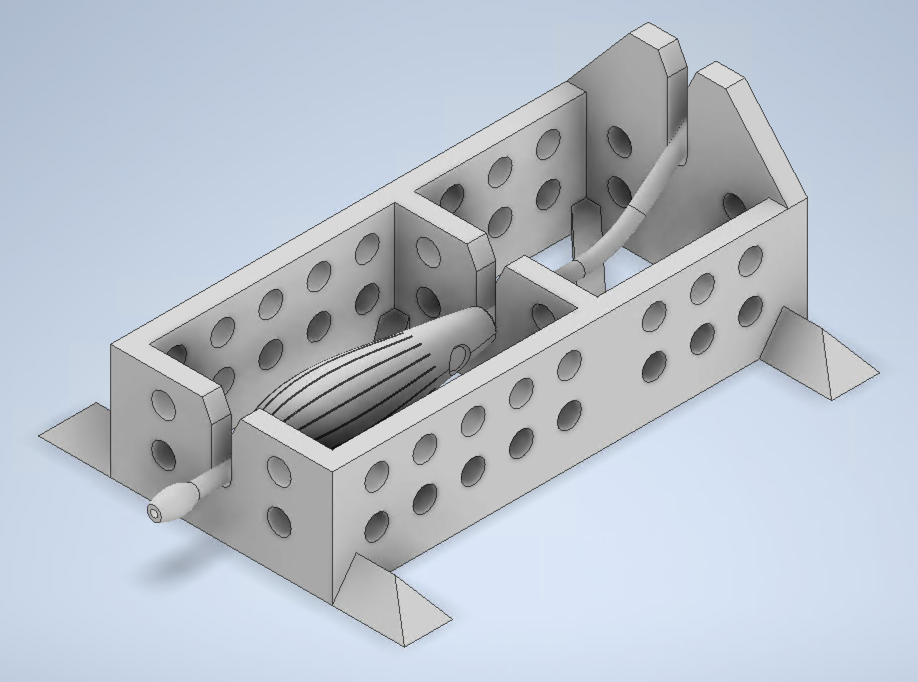
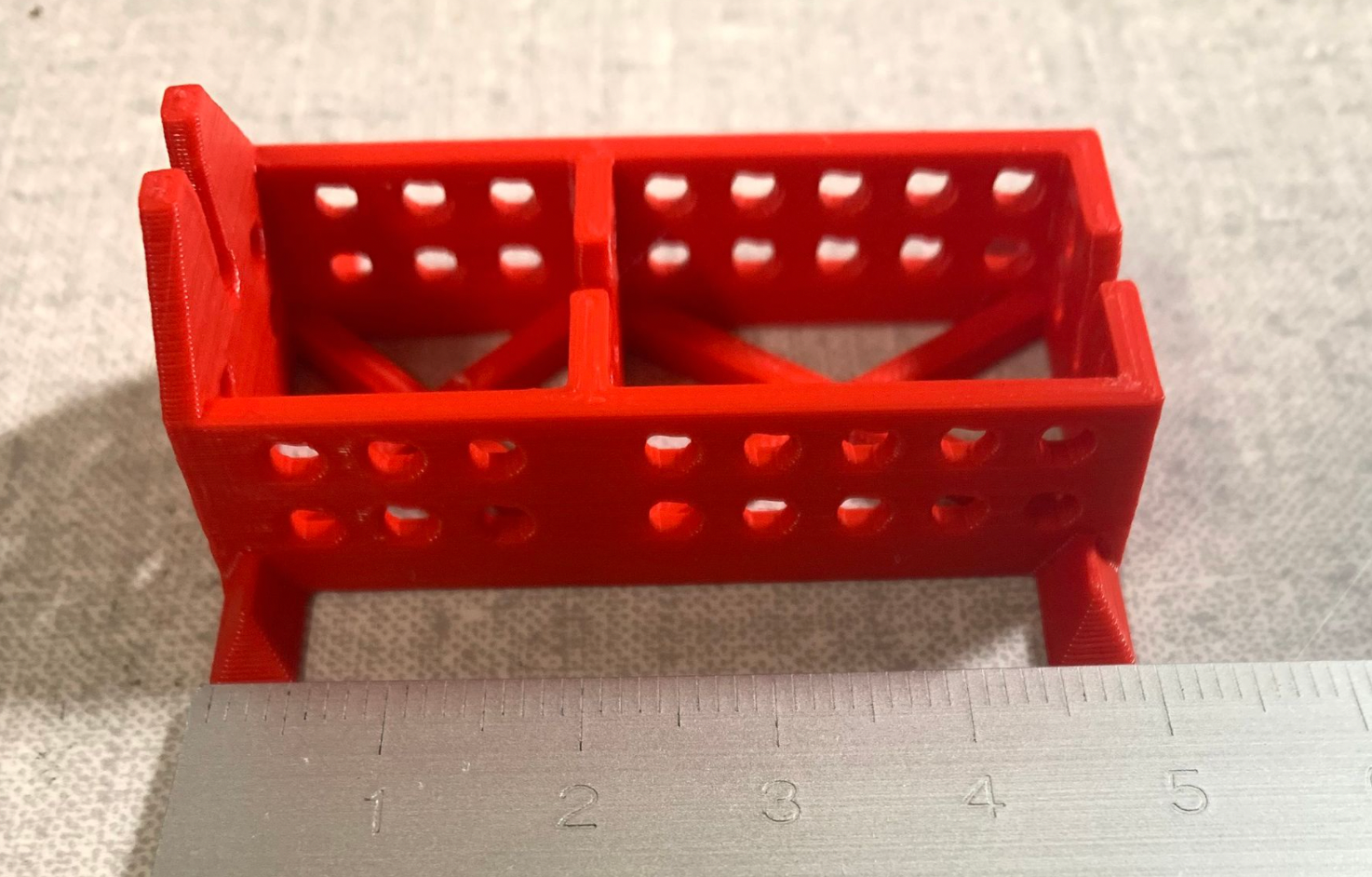
(Unfortunately the 3D printed version is 50% scaled)
Last update:
December 9, 2021
Created: December 9, 2021
Created: December 9, 2021